





ΟΜΑΔΑ ΡΟΜΠΟΤΙΚΗΣ
1ο ΕΠΑ.Λ. ΔΑΦΝΗΣ












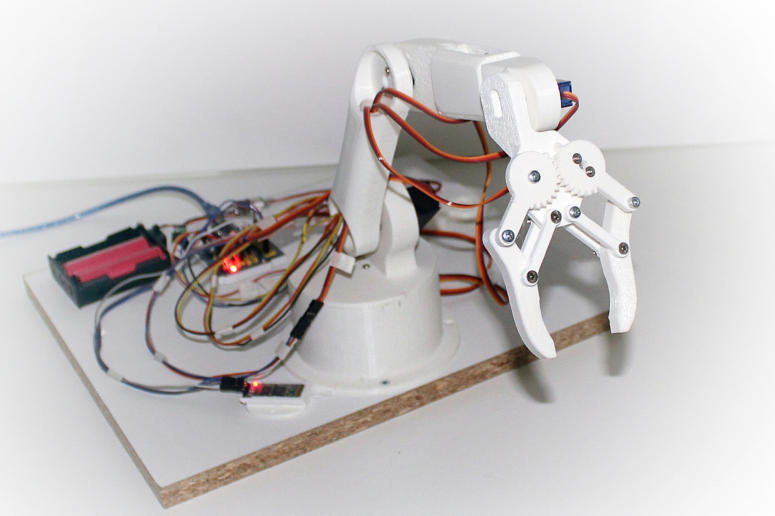
Έξυπνος Ρομποτικός Βραχίονας έξι αξόνων που εκπαιδεύεται
να εκτελεί κινήσεις μέσω SmartPhone ή Tablet
Κατασκευάσαμε έναν Έξυπνο Ρομποτικό Βραχίονα, σταθερής βάσης, έξι αξόνων χρησιμοποιώντας έναν
μικροελεγκτή Arduino Nano, μια μονάδα Bluetooth HC-06 και έξι Servo κινητήρες.
Ο ρομποτικός βραχίονας έχει εκτυπωθεί με τον 3D εκτυπωτή του σχολείου μας (Wanhao Duplicator i3).
Με την χρήση του κινητού τηλεφώνου ως τηλεχειριστήριο μπορεί ο βραχίονας να μετακινήσει αντικείμενα
επικοινωνώντας μέσω Bluetooth. Έχει δυνατότητα να αποθηκεύει τις κινήσεις που θα εκτελέσει με το τηλεχειριστήριο
και στην συνέχει να τις εκτελεί αυτόνομα.
Μπορεί να προγραμματιστεί έτσι ώστε να λειτουργεί αυτόνομα ή μέσω τηλεχειρισμού.
Μπορεί επίσης να προγραμματιστεί ώστε να εκτελεί μια συγκεκριμένη λειτουργία μόνο παραδείγματος χάρη να
σηκώνει ένα αντικείμενο και να το μετακινεί σε μία άλλη θέση ή να βιδώνει μια βίδα.
Η δαγκάνα ανοίγει κατά 50 μοίρες και μπορεί να πιάσει αντικείμενα, ο καρπός του βραχίονα κινείται έως 80 μοίρες,
ο καρπός περιστρέφεται κατά 90 μοίρες, ο αγκώνας έως 30 μοίρες, η βάση έως 70 μοίρες ενώ μπορεί να κάνει
και περιστροφή έως 160 μοίρες.
Για το Arduino έχει γραφτεί κώδικας σε γλώσσα προγραμματισμού C (Wiring ) και για την δημιουργία της εφαρμογής
για φορητές συσκευές με περιβάλλον Android χρησιμοποιήθηκε το App Inventor όπου είναι μια web εφαρμογή
ανοικτού κώδικα και στην οποία γράφτηκε κώδικας με χρήση block.
ΛΕΙΤΟΥΡΓΙΑ
Ο ρομποτικός βραχίονας που κατασκευάσαμε έχει δύο βασικές δυνατότητες:
Α) Να προγραμματιστεί ώστε να εκτελεί μια συγκεκριμένη λειτουργία π.χ. να πιάνει ένα αντικείμενο και να το
μετακινεί σε μια άλλη θέση και στην συνέχεια να το ξαναπιάνει και να το επιστρέφει στην αρχική του θέση.
Β) Να εκτελεί με τηλεχειρισμό μέσω του κινητού μας τηλεφώνου μια λειτουργία και στην συνέχεια να την μαθαίνει
και να την εκτελεί κατ επανάληψη.
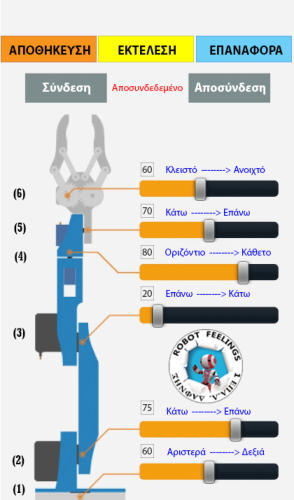
Στο σχήμα 2 βλέπουμε την οθόνη της εφαρμογής σε περιβάλλον Android με την οποία επικοινωνούμε ασύρματα
με τον βραχίονα και με τηλεχειρισμό τον κινούμε.
Βλέπουμε σε γραφικό περιβάλλον τα τμήματα του βραχίονα. Σε κάθε τμήμα αντιστοιχεί δεξιά μια Slide Bar.
Με την βοήθεια τους μπορούμε να κινήσουμε το αντίστοιχο τμήμα του βραχίονα. Ταυτόχρονα φωτίζεται το γραφικό
τμήμα που μετακινούμε κάθε φορά. Πάνω από κάθε Slide Bar υπάρχει ετικέτα όπου εμφανίζεται η γωνία περιστροφής
του αντίστοιχου Servo κινητήρα.
Επίσης υπάρχει ενημέρωση για την λειτουργία που εκτελούμε δηλαδή αν ανοίγουμε ή κλείνουμε την αρπάγη ή αν
μετακινούμε προς τα επάνω ή κάτω, αριστερά ή δεξιά κάποιο τμήμα του βραχίονα.
Κάθε φορά που εκτελούμε μια ενέργεια (κινούμε έναν servo Κινητήρα) πρέπει στην συνέχεια να πατάμε το κουμπί
«ΑΠΟΘΗΚΕΥΣΗ» για να αποθηκευτεί η κίνηση.
Όταν ολοκληρώσουμε όλες τις κινήσεις τότε πατάμε το κουμπί «ΕΚΤΕΛΕΣΗ» και ο βραχίονας αρχίζει να εκτελεί
μόνος του την κίνηση που έχει μάθει. Κάθε φορά που πατάμε το κουμπί «ΕΚΤΕΛΕΣΗ» θα εκτελείτε η κίνηση μια
μόνο φορά.
Όταν πατήσουμε το κουμπί «ΕΠΑΝΑΦΟΡΑ» τότε διαγράφονται όλες οι κινήσεις ώστε να ξεκινήσουμε μια νέα
εκμάθηση κινήσεων.
Αρχικά πρέπει να πατήσουμε το κουμπί «Σύνδεση» ώστε να επικοινωνήσει το κινητό μας ή το Tablet με το Arduino
μέσω Bluetooth. Αν πραγματοποιηθεί η επικοινωνία τότε δεξιά από το κουμπί θα εμφανιστεί ή φράση «Συνδεδεμένο».
Αν θέλουμε να διακόψουμε την επικοινωνία τότε πατάμε το κουμπί «Αποσύνδεση» και αριστερά από το κουμπί θα
εμφανιστεί ή φράση «Αποσυνδεδεμένο».
Σχήμα 2
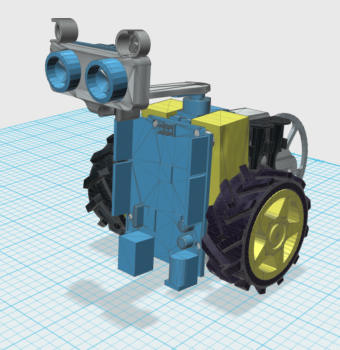
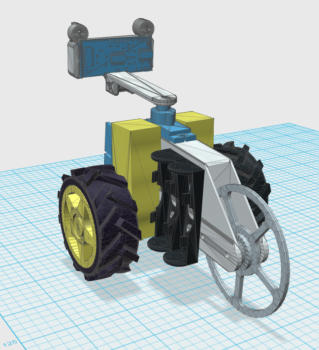
Κατασκευάσθηκε αυτόνομα όχημα το οποίο μπορεί να κινείται στον χώρο και να αποφεύγει την σύγκρουση με
τα αντικείμενα του χώρου.
Εκτυπώθηκε με 3D εκτυπωτή και φέρει δύο μοτέρ, έναν αισθητήρα απόστασης, δύο led και τον μικροελεγκτή
Arduino Nano.
Οι μαθητές μας προγραμμάτισαν το ρομπότ ώστε:
Α) Να αναγνωρίζει και να αποφεύγει, κατά την κίνηση του, τα αντικείμενα του
περιβάλλοντος χώρου.
Β) Μπορεί να βλέπει το χέρι μας με τον αισθητήρα και να το ακολουθεί.
Η Ομάδα Ρομποτικής της Β΄και Γ΄ Τάξης Πληροφορικής ( Σχολική Χρονιά 2019-2020)
που συμμετείχε στον Πανελλήνιο Διαγωνισμό Ρομποτικής Generation Next
Smart Pet με χρήση Arduino
Ρομποτικές κατασκευές της Ομάδας Ρομποτικής (Σχ. Χρονιά 2019-2020)
Υπεύθυνος Καθηγητής: Α. Τσιατούχας
Συμμετείχαν Γ΄ Τάξη: Ρουμπέση Ιωάννα, Χριστόπουλος Χάρης και Σανμπακδτζιάν Μόνικα.
Συμμετείχαν Β΄ Τάξη: Alemiar Ahmad, Γιερογιάν Έντουαρτν, Δρίζης Γκλέμπ, Καββαδά Ειρήνη,
Λε Μιν Κουάν και Μάρκου Αλέξανδρος.






Σχεδίαση Ιστοσελίδας : Αρης Τσιατούχας (2021)
Σχολικό Έτος
2019-2020



















